
Page 36 - 网络电信2020年1/2月刊下
P. 36
光 通 信
类、信息服务类等。边缘计算依靠其位于网络边缘的分布式部 (1)数据采集
署、多接入支持和强大计算能力可以提供支持其中的很多应用 MEC支持多种传感器连接的数据采集,包括:直接有线连
场景,典型应用如下。 接到MEC,如图5(a)所示,例如路边部署的高清摄像头、激光
1、车联网信息感知融合 雷达信息等;Uu口直接接入,如图5所示,例如车端传感器信息
以分布式传感和多源异构信息融合为核心的车路协同感知 等;网关汇聚再通过Uu连接到MEC,如图5(b)所示,例如远程
体系是实现自动驾驶的重要技术方向。为了更好地感知环境, 控制的车辆上部署网关汇聚车端传感器信息;RSU汇聚再通过
车联网运营商在路端部署传感器,例如高清摄像头、激光雷达 Uu连接到MEC,如图5(a)所示,是典型的路边部署RSU设备场
等,辅助车辆感知视距之外的路况;同时,车端也可以部署传 景。
感器来直接感知车辆视距范围的情况,包括车载摄像头、雷达 (2)融合处理
等。车联网系统需要收集这些传感器信息,提供给视频分析、 MEC提供计算加速能力,支持视频AI分析、雷达信息分析
高清地图等应用进行分析处理,并将结果下发给车辆。 等应用。例如,激光雷达和摄像头坐标位置标定,并分别采集
车联网感知融合系统包括感知信息的采集,感知信息融合 获取激光雷达点云信息和摄像头视频图像信息,然后通过融合
和信息发布3个方面。 处理对可探测范围内的移动障碍物(机动车、非机动车、行人
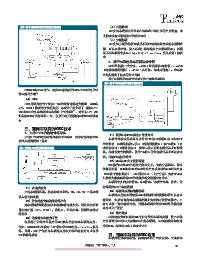
基于MEC的车联网感知融合方案如图5所示。 等)进行检测、识别处理后计算出关联目标的方位、距离、速
图5 基于MEC的车联网感知融合方案 度及运动方向等信息,并可根据实际路况场景做进一步警告威
胁判断。
(3)结果分发
V2X消息下行分发到车辆的方式有2种。一种是通过MEC先通
过Uu口分发到RSU,再由RSU通过PC5分发到车辆;另一种方式是
MEC直接通过Uu分发到网关或车辆。
基于MEC的感知融合服务可以应用于多个场景,例如十字路
口防碰撞。当车辆打算过路口时,如果垂直方向有车辆高速过
路口,则MEC发警告信息给HV车,避免碰撞,如图6所示。
图6 十字路口防碰撞
2、高清地图分发
高精地图是指精度更高、数据维度更多的电子地图。精度
精确到cm级别,数据维度更多体现在包括了除道路信息之外的
与交通相关的环境信息(包括静态和动态的信息),比如交通
标志、交通信号等相对于二维网格的位置以及信号灯、车辆、
行人等半动态和动态信息。高精地图目前面临的难点有:实时
更新、数据同步困难;云平台计算能力的有限性,包括但不限
于数据收集、运算、交互、分发等;车端感知设备和计算设备
成本高。
MEC支持高清地图方案如图7所示。
灵活的分层架构。变化频率较高的半动态数据和动态数据
建议部署在不同位置的MEC进行处理,例如半静态的数据可以在
位置稍高的MEC处理,包括信号灯灯色(相位、配时)、交通拥
堵的情况、交通事故情况和其他交通事件等状态过程。而比较
56 网络电信 二零二零年一、二月