
Page 29 - 网络电信2024年3月刊
P. 29
光 通 信
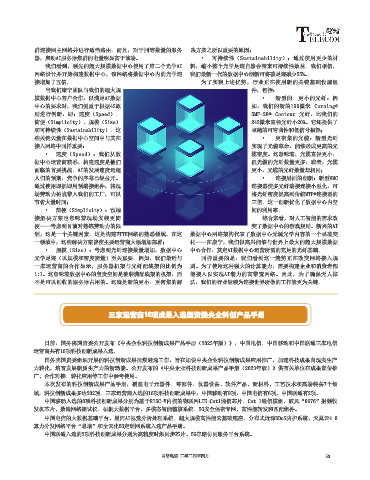
图1 岸边6G基站+无人机的通信方案示意图
将能够提供连续广域覆盖的6G基站作为地面基地,使得安 以减少无人机对能量的消耗。潜航器上浮期间的具体工作流程
装了6G UE(用户终端)的无人机能够更容易找到与地面基地之 如下:
间的直接通信链路,从而由无人机作为桥梁,潜航器与水面上 a)潜航器通过激光D2D通信链路告知无人机已开始上浮。
的基地之间将始终保持不间断的实时信息传输。 b)潜航器一旦从水下浮上水面,将尝试接入6G基站。
基于6G基站的协助,可以更加适时和快速地建立潜航器与 c)若潜航器可直接接入6G基站,则潜航器断开与无人机之
无人机之间的D2D通信链路。 间的激光D2D通信链路,6G基站通知无人机飞回降落点。若潜航
在潜航器下潜期间,无人机通过与潜航器的6G D2D连接, 器不能直接接入6G基站,潜航器与无人机之间建立6G D2D通信
辅助潜航器与无人机尽快建立起稳定的蓝绿激光通信连接,从 链路,然后断开与无人机之间的激光D2D通信链路。潜航器继续
而始终让潜航器和6G基站处于不间断的双向实时通信状态,以 尝试接入6G基站直至成功,然后断开与无人机之间的6G D2D通
确保潜航器的安全。潜航器下潜期间的具体工作流程如下: 信链路,6G基站通知无人机飞回降落点。
a)潜航器向6G基站发送包含潜航器位置信息的下潜指示信 当然,如果对于传输速率和时延要求不高的话,本方案中
息,暂停下潜。 的6G基站及6G UE也可以用5G基站及5G UE来代替。
b)6G基站通知无人机飞向潜航器所在的目标水域上方的空 2.2 卫星直联
域。 基于卫星直联的通信方案如图2所示。卫星直联方案的全称
c)当无人机到达目标水域上方的空域后,与潜航器建立6G 是:基于卫星星载蓝绿激光收发器的方案。该方案的主要原理
D2D通信链路。 是:GEO(地球同步轨道卫星)和LEO(低地球轨道卫星)通过
d)6G D2D通信链路能确保潜航器不间断地与地面的双向实 星间互联共同组成了天基网络。低地球轨道卫星LEO-1安装了蓝
时通信,帮助无人机与潜航器之间更便捷高效地建立激光D2D通 绿激光收发器和6G无线信号收发模块,作为地面信关站与潜航
信链路。 器之间的中继节点建立起通信连接。
e)潜航器断开与无人机的6G D2D通信链路,并继续下潜。 其中,地面信关站通过下行链路获取LEO-1卫星节点的状态
f)潜航器在水下潜航时通过激光D2D通信链路与无人机保 信息,通过上行链路将潜航器上的用户终端请求响应先发送给
持双向实时通信。 LEO-1卫星节点,再由LEO-1卫星节点通过蓝绿激光链路转发给
在潜航器上浮期间,无人机通过与6G基站的6G D2D连接, 潜航器上的用户终端,并响应用户终端的请求。该链路建立时
尽快让潜航器和6G基站建立起稳定的双向直接实时通信状态, 也需要进行激光对准等细节操作,此处不再赘述。
58 网络电信 二零二四年四月