
Page 27 - 网络电信2020年4月刊上
P. 27
15cm以内,满足定位需求。
图 3(a)模拟行走路线图(b)实际路线与理论路线图
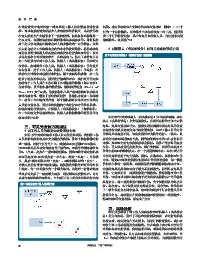
图5 (a)机器人(或其他设备)定位理论位置与实际位置(b)机器人(或其他设备)定位理论位置与实际位置误差分析
个路线图进行移动,图(b)为电脑上实时显示出的实际走的路
线和理论路线的误差,红色为实际路线,灰色为理论路线,由 五、结束语
图可以看出,理论与实际误差不大,可以满足导航的需求。 可见光定位技术以其保密性好,成本低,绿色照明,无
其次进行了对工作人员定位实验,将摄像头固定在房间 需频谱认证抗电磁干扰等优点正在快速发展,其拥有广阔的应
的天花板上,三个LED灯为一个模块放置在地面上,模块的中 用前景,尤其是将可见光应用在高危行业中也必将成为未来的
心即为需要定位的实际位置,使三个灯都在摄像头的照射范围 发展趋势,会为工业高危行业发展带来一定的便利。本文以可
之内,每50cm移动模块的位置,分别记录模块的实际位置和摄 见光定位为主要研究对象,提出了一种在特高压电力场景下应
像头定位计算出的位置,对数据进行整理并进行误差分析,得 用可见光进行工作人员和机器人(或其他设备)定位导航的方
到下图所示图片:其中,理论值为黑色方块,实际定位值为红 案,阐述了其原理并搭建了实验平台,进行了实验验证和误差
色圆点,两者之间的距离为定位误差。由图4(a)可知,误差 分析,误差在允许范围内,所采用的方案可行有效,能够实现
控制在很小的范围内,可以满足对工作人员定位的需求。图4 定位功能且效果较好。
(b)为理论位置与实际定位位置的误差分析,黑色线段表示偏
离理论y值的大小,红色线段表示偏离理论x值的大小,由图可
以看出,误差可以控制在15cm以内,满足定位需求。
图 4 (a)工作人员定位理论位置与实际位置(b)工作人员定位理论位置与实际位置误差分析
参考文献
[1] 高压输电线路电磁环境分析及人体生物效应研究[D].高阳,
华北电力大学,2015
[2] 边海燕,探究高压输电线路和变电站的电磁辐射的防护[A].
环境与发展,2019
[3] 赵黎,王栋,韩中达,电磁敏感场景可见光智慧照明及环
境监测系统[A].激光技术,2019
最后进行了对机器人(或其他设备)定位的验证,将灯布 [4] 矿井下基于可见光的定位系统设计[D]. 肖冰瑞.天津工业
置在天花板上,将图像传感器放置在地面上,并移动图像传感 大学,2018
器的位置,记录理论值与定位值。每50cm移动摄像头,对数据 [5] 季超,杨晓东,陈长青,海天背景下舰船可见光图像目标
进行整理并进行误差分析,得到下图所示图片:其中,理论值 区域定位方法[A].火力与指挥控制,2017(42)7:66-71
为黑色方块,实际定位值为红色圆点,两者之间的距离为定位 [6] Bangjiang Lin,Xuan Tang,Yiwei Li,Experimental
误差。由图5(a)可知,误差控制在很小的范围内,可以满足 Demonstration of Optical Camera Communication Based
对机器人(或其他设备)的需求。图5(b)为理论位置与实际 Indoor Visible Light Positioning System,IEEE 2017
定位位置的误差分析,黑色线段表示偏离理论y值的大小,红色 16th International Conference on Optical
线段表示偏离理论x值的大小,由图可以看出,误差可以控制在 Communications and Networks (ICOCN),2017,pp:7-10
网络电信 二零二零年四月 37